آنچه در این مقاله میخوانید :
Toggleدر مقاله آموزشی امروز از مجله هادی بان الکترونیک به بررسی و توضیح روتاری انکودر یا همان انکودر چرخشی میپردازیم، نحوه عملکرد و کاربردهای آن را با هم مرور میکنیم.
سپس پایههای اتصال آن به دستگاههای دیگر بررسی میکنیم. پس تا پایان این مطلب با ما همراه باشید.
روتاری انکودر (انکودر) چرخشی چیست؟
روتاری انکودر (Rotary Encoder) نوعی از حسگرهای موقعیت است که برای مشخص کردن زاویه و موقعیت میله چرخنده استفاده میشود.
این قطعه سیگنال الکتریکی تولید میکند که بسته به نوع حرکت و چرخش، میتواند آنالوگ و دیجیتال باشد.
مقایسه انکودر چرخشی با پوتانسیومتر
شاید بتوان انکودرهای چرخشی را معادل دیجیتالی از پتانسیومترها در نظر گرفت، با توجه به این موضوع که آنها چند سو گرد نیز هستند.
همچنین انکودرهای چرخشی قابلیت گردش ۳۶۰ درجه و بدون توقف را دارند، درحالیکه پوتانسیومترها تنها میتوانند ۳/۴ دایره بچرخند.
دیگر تفاوت آنها این است که پتانسیومتر برای مواقعی استفاده میشود که میخواهید موقعیت دقیق میله چرخنده را بدانید، ولی روتاری انکودر برای فهمیدن تغییرات موقعیتی میله چرخنده کاربرد دارد.
انواع روتاری انکودر
مدلهای مختلفی از انکودرهای چرخشی وجود دارد که بر اساس سیگنال خروجی یا فناوری حسگرشان طبقهبندی میشوند.
بهطورکلی این قطعات را میتوان در ۲ دسته اصلی طبقهبندی کرد:
۱- انکودرهای چرخشی مطلق

۲- انکودرهای چرخشی افزایشی

نوع اول موقعیت دقیق میله چرخنده را برحسب درجه گزارش میدهد و نوع دوم، مقدار افزایشی که از حرکت میله چرخنده به وجود آمده را اندازهگیری میکند.
نحوه کارکرد انکودرهای چرخشی
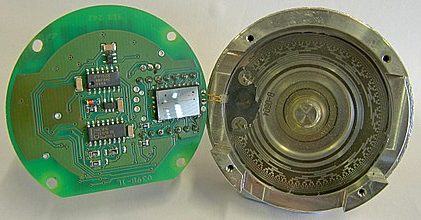
اگر بخواهیم نگاهی دقیقتر به نحوه کارکرد انکودرهای چرخشی بیندازیم، میتوانیم این موضوع را اینگونه شرح دهیم که انکودر چرخشی دارای صفحهای است که محلهای تماس مساوی و هماندازه دارد که به پین عمومی C و ۲ پایه تماس مجزای دیگر که A و B باشند متصل است. در تصویر زیر میتوانید این موضوع را بهتر مشاهده کنید.

وقتیکه این صفحه شروع به چرخیدن گامبهگام میکند، پایههای A و B با پایه عمومی C برخورد و سیگنالهای خروجی مطابق با این برخوردها تولید میشود.
هرکدام از خروجیها را میتوان برای مشخص کردن مقدار چرخش استفاده کرد، بهشرط اینکه بتوانید پالسهای سیگنال ارسالی را شمارش کنید.
البته اگر میخواهید جهت چرخش را هم متوجه شوید، باید هر دو سیگنال را بهصورت همزمان زیر نظر داشته باشید.
اگر انکودر به حالت ساعتگرد چرخش کند، سیگنال خروجی A جلوتر از خروجی B خواهد بود و اگر انکودر پادساعتگرد بچرخد، این رویه برعکس میشود و سیگنال خروجی B جلوتر از سیگنال خروجی A خواهد بود.
📣حتما ببینید : خرید روتاری انکودر با بهترین قیمت
دقت عملکرد انکودرهای چرخشی
رزولوشن (Resolution) یا دقت عملکرد روتاری انکودرها به حداکثر مقدار درجهای بستگی دارد که در یک گردش کامل قابل شمردن باشد.
برای انکودرهای افزایشی، دقت عملکرد مستقیماً به تعداد پالسهایی که از خروجی به ازای هر گردش ارسال میشود و برای انکودرهای مطلق، این دقت عمل به تعداد بیتهای انکود شده مرتبط است.
برای مثال یک انکودر ۱۶ بیت، دقت عملکردی ۶۵،۵۳۶ درجه در هر گردش دارد.
کاربردهای انکودرهای چرخشی در صنعت
• دستگاههای کنترلکننده دربهای خروجی و ورودی
• ساختن قطعات الکترومکانیکی روباتها
• دستگاههای تولیدکننده عدسی عینکهای طبی
• پلاترها (پرینترهای چاپ نقشه و بنرهای بزرگ)
• ماشینهای آزمایشکننده
• جوشکاری فراصوت
• دستگاههای بستهبندی
• تجهیزات فنی پزشکی
• ماشینهای اسمبل (سرهم) کننده
• دستگاههای لیبل (برچسب) زن
• ماشینهای مخلوط کننده
• دستگاههای حفاری
• سامانههای تحلیلگر
مزیتهای انکودرهای چرخشی
• قابلاتکا و دقیق بودن خروجی
• قدرت نظارتی بالا در ازای هزینه کم
• دقت عملکردی بسیار بالا
• ترکیب فنّاوری آنالوگ و دیجیتال
• میتواند با دیگر دستگاهها برای کاربردهای مختلف ترکیب شود
• اندازه جمعوجور و فشرده دستگاه
توضیحاتی در مورد پایههای انکودر چرخشی
برای اینکه بتوانید روتاری انکودر را به قطعات دیگری در مدار مانند آردوینو متصل کنید، بهتر است اول از همه با پایههای آن آشنا شوید. این پایهها شامل موارد زیر هستند:
* GND که اتصال گراند را برقرار میکند.
* VCC پایه مثبت منبع تغذیهای است که معمولاً ۳٫۳ تا ۵ ولتی است.
* SW خروجی فعال سوئیچ فشاری است، یعنی هنگامیکه میله چرخنده به پایین فشرده میشود، ولتاژ آن در حالت LOW قرار میگیرد.
* DT (خروجی B) مانند خروجی CLK است ولی پشت هر تغییر فاز ۹۰ درجهای حرکت میکند این خروجی جهت چرخش را نیز مشخص میکند.
* CLK (خروجی A) خروجی اصلی پالس است که مقدار چرخش را مشخص میکند. هر بار که میله کند، خروجی CLK وارد چرخه HIGH و سپس LOW میشود.

برای اینکه بتوانید روتاری انکودر را به قطعات دیگری در مدار مانند آردوینو متصل کنید، بهتر است اول از همه با پایههای آن آشنا شوید. این پایهها شامل موارد زیر هستند:
* GND که اتصال گراند را برقرار میکند.
* VCC پایه مثبت منبع تغذیهای است که معمولاً ۳٫۳ تا ۵ ولتی است.
* SW خروجی فعال سوئیچ فشاری است، یعنی هنگامیکه میله چرخنده به پایین فشرده میشود، ولتاژ آن در حالت LOW قرار میگیرد.
* DT (خروجی B) مانند خروجی CLK است ولی پشت هر تغییر فاز ۹۰ درجهای حرکت میکند این خروجی جهت چرخش را نیز مشخص میکند.
* CLK (خروجی A) خروجی اصلی پالس است که مقدار چرخش را مشخص میکند. هر بار که میله کند، خروجی CLK وارد چرخه HIGH و سپس LOW میشود.
اتصال روتاری انکودر به مدار آردوینو UNO
همانطور که قبلاً گفتیم برای بهره بردن از انکودهای چرخشی باید آنها را به مدارهای میکروکنترلر و سپس کامپیوتر وصل کنید.
در اینجا برای مثال اتصال پایههای انکودر چرخشی به مدار آردوینو UNO را برای شما شرح میدهیم.
• پایه VCC انکودر را به پایه ۵V آردوینو متصل گردد.
• پایه GND انکودر را به پایه GND آردوینو متصل گردد.
• پایه CLK انکودر به پایه D3 آردوینو متصل شود.
• پایه DT انکودر به پایه D4 آردوینو متصل شود.
سپس میتوانید مدار آردوینو را از طریق کابل USB به کامپیوتر وصل کنید و از طریق کد نویسی و برنامههای مرتبط با آن، مقادیری مانند سرعت، فاصله و مقدار چرخش و جهت میله چرخنده در روتاری انکودر را ثبت و مشاهده کنید.

جمعبندی
در مقاله امروز قطعه مهمی بنام روتاری انکودر یا انکودر چرخشی را معرفی کردیم و نحوه کارکرد آن را توضیح دادیم.
سپس انواع مختلف این قطعه و پایههای آن را بررسی کردیم و نحوه اتصال آن به مدارهایی مانند آردوینو را توضیح دادیم.
امیدواریم که مطلب امروز ما برایتان مفید بوده باشد. همچنین در صورت علاقهمندی به مباحث بیشتر در حوزه الکترونیک میتوانید دیگر مقالههای مجله خبری آموزشی هادی بان الکترونیک را مطالعه بفرمایید. با تشکر از توجه شما.








دیدگاهتان را بنویسید